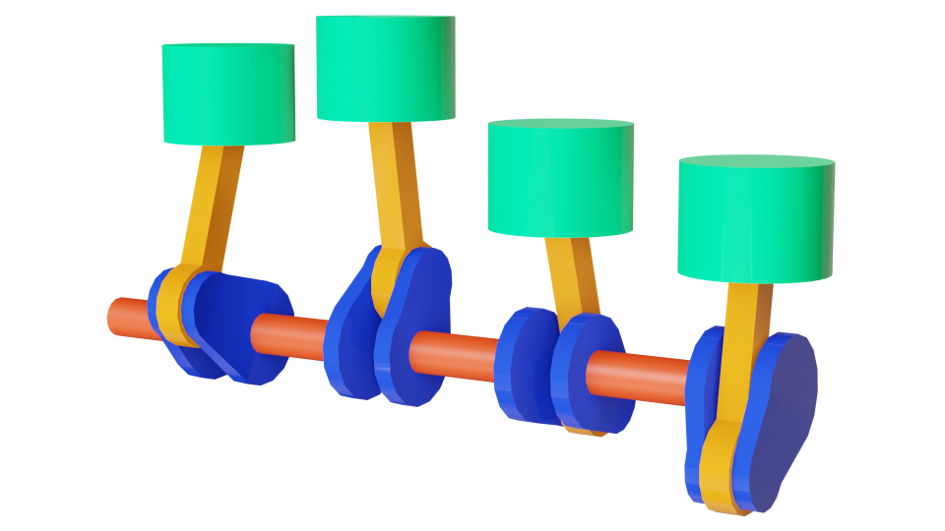
Kineverse
Kineverse is a framework for developing and exchanging articulation models in a ROS ecosystem. It is mostly aimed to be used in the context of mobile manipulation robots.
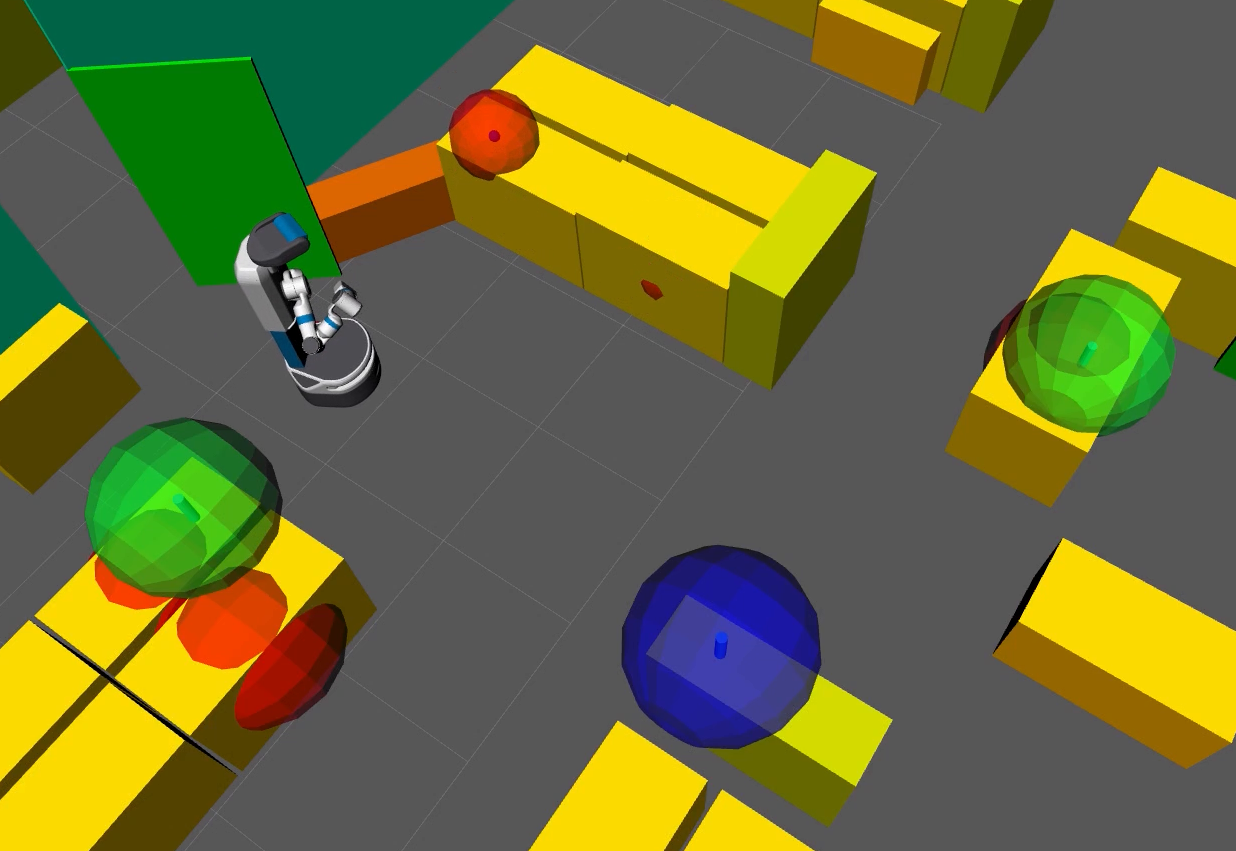
Prime Bullet
Prime Bullet is an object oriented wrapper around the PyBullet project, aimed at providing a light-weight robot simulator.
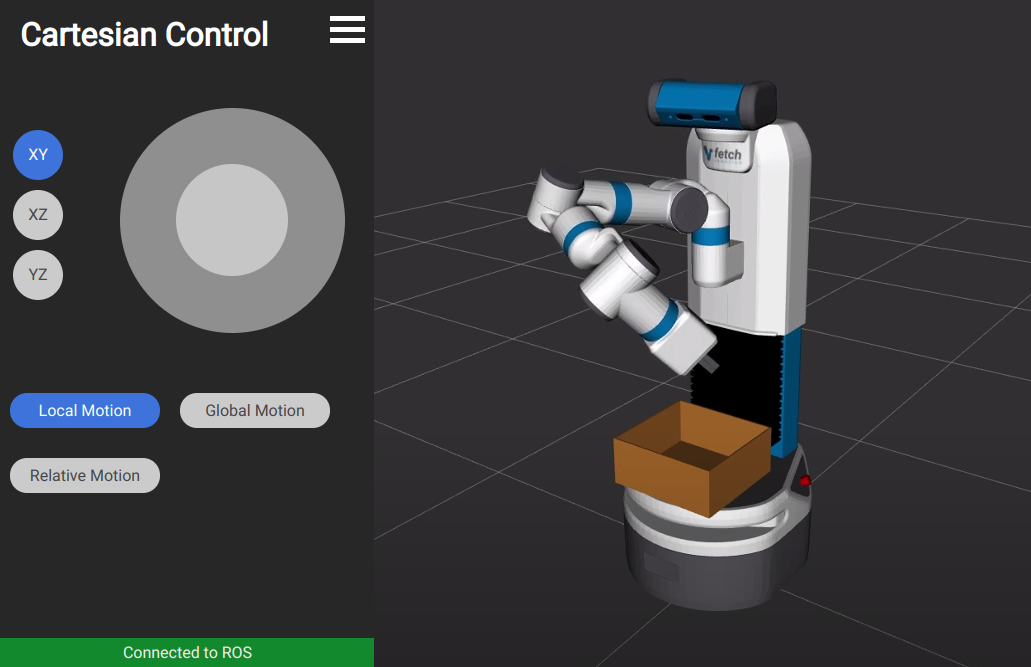
Smart EEF Control
The Smart EEF Control is a small ROS package which enables its user to control their robot's end effector using their smartphone.

pdf_tool
The pdf_tool is a tiny Python program meant to manipulate pdf files from the terminal.